El 4 de abril tuvimos la oportunidad de probar un nuevo T6.160 AutoCommand en tierras de Cantalejo, Segovia. Se han realizado dos tipos de tarea con el tractor: la preparación del lecho de siembra con una grada rotativa y el transporte de un remolque cargado. La parcela tenía una textura fuertemente arenosa típica de la zona y se encontraba en un estado de tempero óptimo. En las distintas pruebas se ha evaluado el modo automático frente al manual. Veamos sus resultados.
Constantino Valero, Pilar Barreiro, Miguel Garrido y Patricia Diego.
LPF_TAGRALIA. Universidad Politécnica Madrid.
Una novedad mediática en el desarrollo de las pruebas ha sido que en esta ocasión nuestro trabajo fue registrado en un vídeo disponible en internet (http://bit.ly/T6AC-ETSIA) por cortesía de New Holland.
Se trata de un tractor con tecnología de reducción catalítica selectiva (SCR ECOBlue) que cumple la normativa Tier 4-A (Stage 3 B) gracias a la adición de solución de urea (AdBlue) tras el colector de gases de escape, entre otros dispositivos. El modelo probado estaba dotado de un motor con potencia nominal de 131 CV (cuadro I), si bien gracias a la gestión electrónica puede proporcionar una reserva de potencia de otros 32 CV extra.
Cuadro I. Características principales del motor
| Potencia máxima ISO TR14396 – ECE R120 (kW/CV) | 120/163 |
| Potencia nominal (kW; CV) | 110; 150 |
| Régimen nominal (rpm) | 2.200 |
| Par máximo con gestión de potencia del motor | 676 a 1.500 |
| Reserva de par (%) | 41 |
| Cilindros / Aspiración / Válvulas / Nivel de emisiones | 4 / Turbo / 4 / Tier 4 A |
| Cilindrada (cm3) | 4.485 |
| Transmisión | Continua AutoCommand (40 km/h ECO) |
| Velocidad mínima/máxima a 1550 rev/min (km/h) | 0,02 / 40 |
| Eje delantero | Suspendido Terraglide |
| Radio de giro (mm) | 4.040 |
| Peso sin lastre (estándar/ con Terraglide) (kg) | 4.890 / 5.190 |
| Altura total/longitud total (mm) | 2.990 / 4.882 |
| Batalla (mm) | 2.387 |
| Ancho de vía (min – máx) (mm) | 1.634 – 2.134 |
La transmisión con la que contaba el modelo probado era continuamente variable (CVT), denominada AutoCommand por New Holland, y que combina elementos mecánicos (mayor eficiencia) con elementos hidráulicos (mayor versatilidad) para adaptarse a las necesidades de marcha en cada momento. El parámetro básico de control para el operador es fijar la velocidad de avance deseada con los botones de la palanca de mando (Command Grip).

Para poder probar el sistema de autoguiado del tractor, algunas de las pasadas con la grada se realizaron alternas (dejando besanas sin labrar) mientras que otras se realizar contiguas.
Sin embargo, también se pueden seleccionar cuatro modos de trabajo, dada una velocidad: el primero es el modo automático, en el cual transmisión y motor se coordinan para mantener la velocidad con el menor consumo; el segundo es el modo “crucero” en el cual es la transmisión la que se adapta a las condiciones de trabajo; en tercer lugar podemos operar en modo totalmente manual, y en cuarto lugar es posible seleccionar el “modo tdf” en el que se garantiza un régimen constante en la toma de fuerza a cualquier velocidad de avance. En nuestras pruebas con la grada rotativa, éste fue el modo seleccionado.
El peso de serie del tractor según catálogo es de 5.190 kg, si bien con los elementos opcionales instalados, más 10 lastres delanteros de 45 kg cada uno, sumó un total de 6.300 kg en báscula. La relación peso-potencia de sólo 38 kg/CV (28,6 según catálogo para tractor sin lastres) es un factor interesante a considerar en este modelo, como veremos más adelante. El tractor estaba dotado de neumáticos delanteros 420/70 R28 y traseros 520/70 R38, inflados a 1,4 bar, sin lastre de agua.
La serie T6 puede montar en el eje delantero varias opciones diferentes. Primeramente se ofrece un eje delantero con suspensión (Terraglide) que sí venía instalado en el equipo probado. Adicionalmente se puede dotar al eje delantero de mayor capacidad de giro con el sistema Supersteer que ofrece un ángulo de giro de 65° para mejorar la agilidad en cultivos en hilera. Este equipamiento se puede combinar con el volante FastSteer, dotado de un segundo anillo interior para virar girando sólo unos pocos grados en el volante. En nuestro caso no estaban instalados los sistemas Supersteer ni FastSteer, pero sí que usamos el sistema integrado de ayuda al guiado (Autopilot) mediante GPS y accionamiento hidráulico, para trazar las besanas y mejorar los giros en cabecera, como veremos.
Es destacable que este sistema de ayuda al guiado no pudo contar con señal RTK para las pruebas, por lo que nos tuvimos que conformar con la recepción de la señal gratuita Egnos.
Otra característica interesante del tractor es el sistema Terralock que gestiona automáticamente el accionamiento de la doble tracción y del bloqueo del diferencial. La información sobre la velocidad de avance y el ángulo de giro determinan cuándo se bloquea el diferencial y, si procede, cuándo se desactiva la doble tracción. Con ello se consiguen radios de giro más reducidos y disminuir los esfuerzos en las transmisiones.

En cuanto a la calidad de la labor realizada es destacable la uniformidad de la superficie de terreno conseguida, que se podía apreciar a simple vista.
También es posible disponer de sistemas opcionales de frenado. Los frenos de alto rendimiento de serie ofrecen una capacidad de frenado suficiente, pero cuando se trabaja en terrenos difíciles o se lleva a cabo una actividad intensa de transporte por carretera con remolques a plena carga, es interesante la opción de dotar a los T6 de frenos hidráulicos o neumáticos para el remolque. Además la doble tracción se activa automáticamente al frenar para aumentar la seguridad.
La cabina, por su parte, estaba dotada de suspensión integrada (Confort Ride) que reduce hasta en un 25% las sacudidas que sufre el conductor, según el fabricante, en coordinación con la suspensión delantera. Además de la palanca multifunción ya comentada, este modelo venía dotado del apoyabrazos SideWinder II, que integra todos los botones de control, el elevador electrónico del tripuntal y la pantalla táctil IntelliView IV, de 26 cm de anchura y buena calidad de imagen. La visibilidad de la cabina era excelente (opcionalmente se podría añadir el techo acristalado) y la situación de los controles y salpicadero buenos, proveyendo información completa en todo momento.
Adquisición de datos
Al igual que en ocasiones anteriores el procedimiento de registro de datos partió de la instalación por parte de miembros del LPF_Tagralia de dos sistemas DGPS centrados en la parte superior de la cabina del tractor. Adicionalmente, los técnicos de New Holland instalaron el ordenador conectado al tractor mediante el conector de diagnóstico Isobus para poder registrar los datos de la centralita del motor.
Pequeños problemas de actualización de software del ordenador de diagnóstico retrasaron temporalmente el registro de datos del motor a través de la línea CAN, pero los técnicos de New Holland solventaron con éxito el problema y se pudo trabajar satisfactoriamente. Esto nos hizo reflexionar sobre la evolución de los tractores agrícolas y su complejidad, ya que la actual combinación de sistemas electrónicos y mecánicos es tan profunda que en ocasiones los problemas en campo se parecen más a los que sufre un ordenador personal (versiones de software) que a los que cabría esperar de una máquina de tracción.
Si los datos obtenidos con los DGPS suponen una frecuencia de adquisición de datos de 1 Hz (1 dato por segundo), los del motor se registran a 10 Hz (10 datos por segundo) e incluyen: ángulo de avance a la inyección (º), cantidad de Adblue (g/h), envío de combustible (mg/cilindro y ciclo), masa de aire (mg/carrera), régimen de motor (rpm), par total (lb * pies), carga de motor (%), presión de combustible (psi), y la presión de sobrealimentación (psi). A partir de ellos es posible calcular el consumo horario (l/h) sabiendo que se produce una inyección por cada dos vueltas del cigüeñal y que el motor dispone de cuatro cilindros.
Los datos de los sistemas DGPS aportan la velocidad real de avance (km/h) y la altitud (m) y nos permiten calcular las coordenadas UTM a partir de los datos del geoide que mejor se adapta a nuestras latitudes.
A todo ello hay que añadir el balizado y cronometrado manual sobre una besana de 75 m empleado para verificar los datos digitales.
Pruebas de campo realizadas y material empleado
Se realizaron dos tipos de tareas con el tractor: preparación del lecho de siembra con una grada rotativa de ejes verticales, accionada por la toma de fuerza y, por otro lado, una tarea de transporte de un remolque cargado con pacas de paja.

Grada rotativa Pöttinger, modelo Lion 302, que se empleó en la preparación del lecho de siembra.
La grada rotativa era una Pöttinger modelo Lion 302, con 10 rotores de doble púa accionados a 1.000 rpm en la tdf, para lo que se fijó el régimen del motor (1.900 rpm). Según catálogo este apero dispone de 3 m de anchura, si bien nuestras mediciones dieron un valor ajustado de 2,90 m, eliminando la anchura de los patines y placas laterales accesorias. Detrás de la grada hay incorporado un rodillo dentado para favorecer el desterronado y acondicionamiento del suelo. La grada se reguló para trabajar a 4 cm de profundidad.
Con dicha grada se realizaron pasadas sobre una parcela que había sido labrada con vertedera la jornada anterior. La textura del terreno era fuertemente arenosa, típica de la zona (comarca del Duratón, Tierra de Pinares), y se encontraba en un estado de tempero óptimo, a pesar de las jornadas de lluvia anteriores. Sólo en un lado de la parcela aparecía un afloramiento arcilloso, que se verá reflejado en algunos de los resultados posteriores. Los valores de índice de cono más frecuentes estuvieron por debajo de 10 kg/cm2 y no se obtuvieron valores superiores a 100 más que para profundidades superiores a 9 pulgadas (22,5 cm) y sólo en ciertos puntos de muestreo, lo que indica la escasa compactación del terreno. En el cuadro II se resumen las principales características del suelo.
Cuadro II. Características del suelo trabajado en las pruebas
| Densidad aparente (kg/m3) | 1.322 |
| Porosidad (%) | 53,92% |
| Grado de saturación (%) | 19,10% |
| Índice de cono a 10 pulgadas (kg/cm2) | 0,46 |
| Desviación típica resistencia a la penetración (kg/cm2) | 0,60 |
Resultados de las pruebas de laboreo
Con objeto de estudiar las posibles diferencias trabajando con gestión automática de motor-transmisión, frente al modo manual, se realizaron pasadas de grada a lo ancho de la parcela, registrando recorridos y valores de motor.
En cuanto a la calidad de la labor realizada es destacable la uniformidad de la superficie del terreno conseguida a simple vista. Los valores medidos de profundidad de laboreo (muestreos a lo largo de cada pasada, en varios puntos) ofrecen valores superiores a los 4 cm fijados, con valores medios de 5,6 y 6,5 cm de profundidad en algunas besanas (desviaciones típicas entre 0 y 1,5 cm), y valores puntuales de hasta 7,5 cm de profundidad en ciertas zonas de la parcela.
No se observaron diferencias de profundidad de la labor entre conducción con transmisión en automático o manual. Dada la escasa compactación del terreno y la labor de volteo previa, parece oportuno tomar con cautela estos datos debido a la dificultad de medición de la profundidad en campo de forma precisa.

Figura 1. Recorridos realizados con la grada rotativa y velocidades registradas con GPS, tanto en conducción en modo automático como en manual.
La velocidad de la labor prefijada fue de 4 km/h, si bien, como se ha explicado antes, el “modo tdf” de trabajo da prioridad a las 1.000 rpm necesarias para accionar la grada frente a la velocidad de consigna. Aun así, en la gráfica de los recorridos de laboreo registrados con GPS (figura 1) se observa una velocidad de marcha más cercana al objetivo en trabajo en automático. Es cierto que el terreno no estaba compactado y que la inclinación de la parcela era escasa, pero los datos confirman la suavidad de marcha que se percibía en la cabina del tractor.
El cuadro III muestra los datos de capacidad de trabajo teórica (ha/h) y efectiva (ha/h) destacando un incremento del 8% en capacidad de trabajo teórica en el modo automático respecto al manual y del 6% en capacidad de trabajo efectiva. Resulta asimismo significativa la reducción de la duración de los virajes de 24,3 s en (modo manual a 21,2 s en modo automático según datos del motor) lo que repercute en incrementos del rendimiento de campo, que serán tanto mayores cuanto menores sean las longitudes de besana en las parcelas (en este caso 133 metros).
Cuadro III. Capacidades de trabajo en modo manual y automático con distintos procedimientos de viraje.
| Velocidad |
|
TV (h/ha) | TE (h/ha) | Rendimiento |
|
||
| real (km/h) | teórica(ha/h) | efectivo (%) | efectiva(ha/h) | ||||
| Auto | Giro omega | 3,9 | 1,180 | 0,1726 | 0,8475 | 0,831 | 0,980 |
| Giro en T | 3,9 | 1,180 | 0,1978 | 0,8475 | 0,811 | 0,957 | |
| Manual | Giro omega | 3,6 | 1,090 | 0,1726 | 0,9174 | 0,842 | 0,917 |
| Giro en T | 3,6 | 1,090 | 0,1978 | 0,9174 | 0,823 | 0,897 |
El cuadro IV muestra los datos promedios de cuatro pasadas correspondientes a dos ensayos en modo automático y uno en modo manual. En ambos casos la mayor velocidad real obtenida en modo automático (3,9 km/h) se obtiene a coste de una mayor carga de motor y consecuentemente consumo horario, aunque el consumo (l/ha) se parece, salvo en la pasada de grada denominada Auto_2 donde se encontraron grandes lascas de arcilla. En ambos modos de conducción el consumo de Adblue en % másico se situó en un 6%.
Cuadro IV. Datos de motor registrados en dos pasadas de grada en modo automático y una en manual.
| Régimen | Carga | Presión_i | Ad_blue | Consumo |
|
Consumo | Ad_blue | |
| rpm | % | psi | kg/h | l/h | ha/h | l/ha | % masico | |
| Auto_1 | 1.898 | 87,12 | 18.890 | 1,278 | 25,33 | 1,18 | 21,47 | 6,01 |
| Manual | 1.900 | 79,80 | 18.910 | 1,187 | 23,2 | 1,09 | 21,28 | 6,09 |
| Auto_2 | 1.851 | 94,17 | 18.290 | 1,276 | 27,39 | 1,18 | 23,21 | 5,54 |
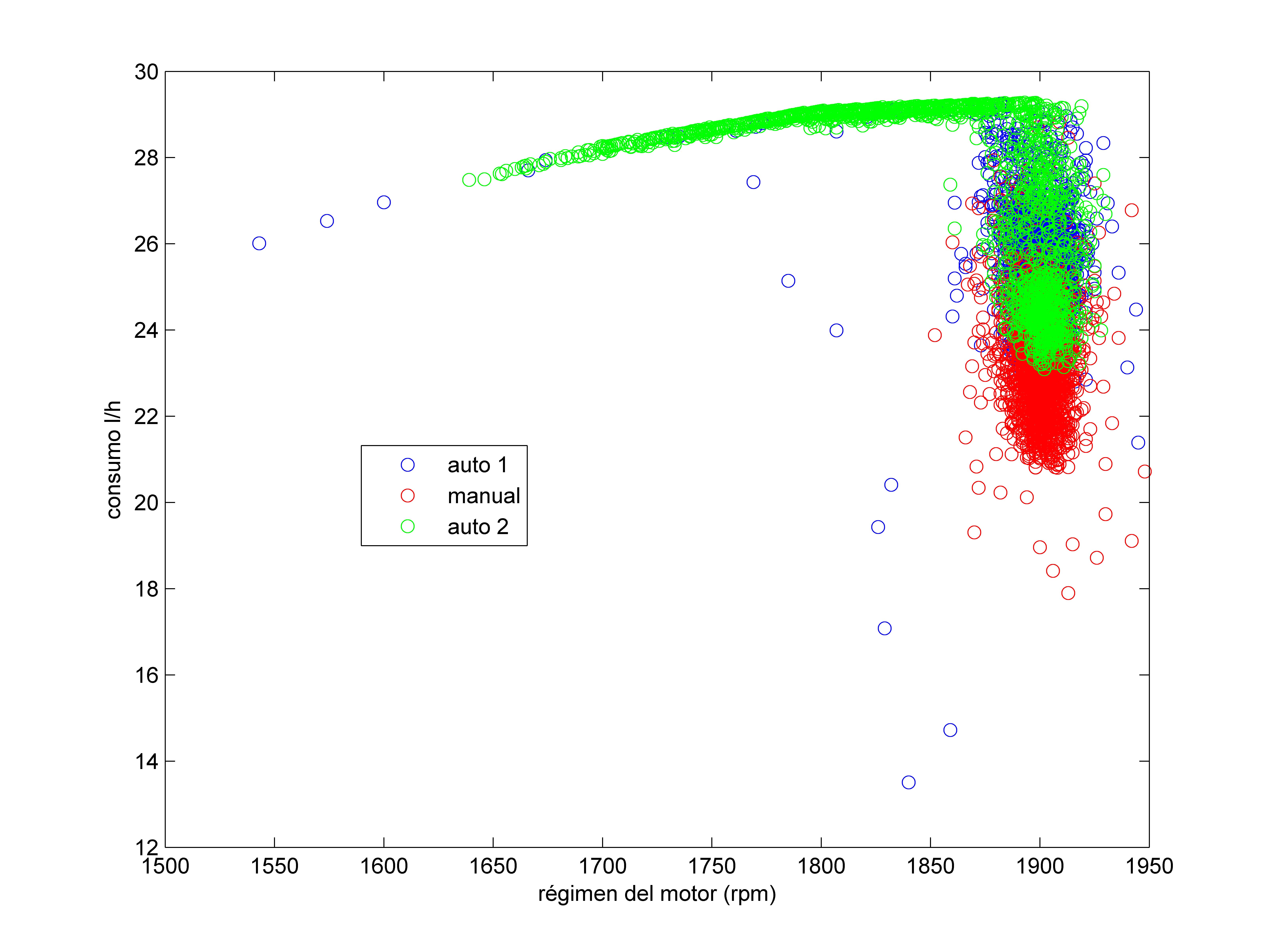
Figura 2. Comparación del régimen del motor y consumo horario de combustible en los ensayos de laboreo. En modo automático se trabajó cerca de un 100% de carga de motor, mientras que en modo manual se mantuvo en un 80% aproximadamente
La figura 2 muestra la relación entre el régimen del motor y el consumo horario (l/h) y en ella se pone claramente de manifiesto la sobrecarga puntual del motor en modo automático al exigirle trabajar a 4 km/h, velocidad que en ningún caso fue alcanzada en el modo manual.
En la pasada Auto_2 sobre terrenos con mayores lascas de arcilla se aprecia cómo el modo automático funciona muy homogéneamente (1.900 rpm y 23 l/h) hasta que se ve obligado a vencer la mayor resistencia poniendo en marcha el sistema de seguridad que impide que el tractor quede atascado reduciendo el número de vueltas de motor. Cuando no se producen sobrecargas del motor los puntos de funcionamiento en modo automático están más agrupados en modo automático que manual.
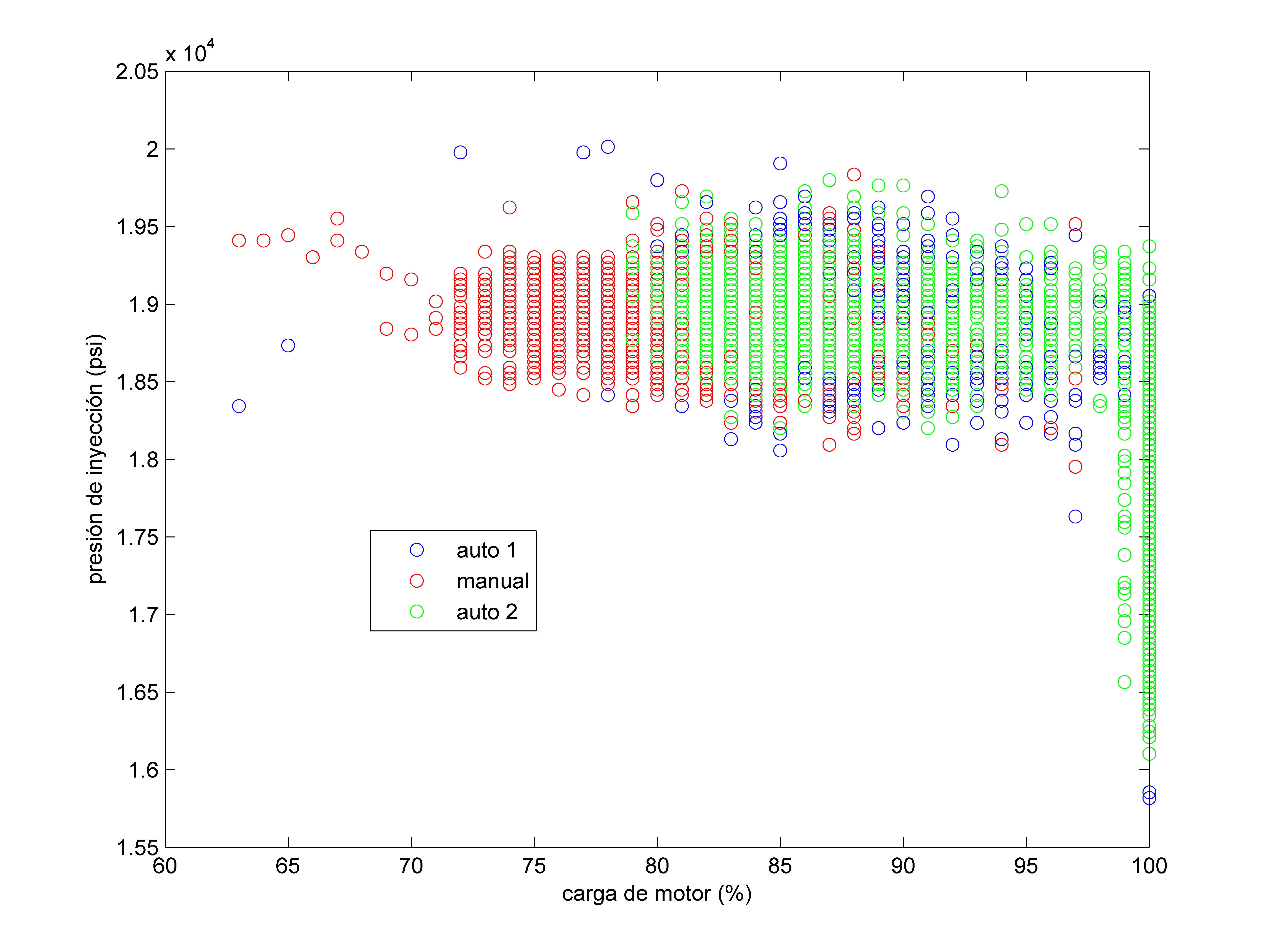
Figura 3. Nivel de carga de motoro y presión de inyección de combustible en los ensayos de laboreo.
La figura 3 muestra que la presión de inyección se mantiene muy constante salvo cuando se produce una sobrecarga excesiva del motor. En la zona de trabajo homogénea en modo automático el motor trabaja a un 85% de carga y una presión de 19.000 psi.
Resultados del sistema de guiado
En este ensayo de campo hemos querido dar relevancia a este aspecto dado que se disponía de un sistema de autoguiado de serie en el tractor. Para ello algunas de las pasadas paralelas de grada se realizaron alternas (dejando besanas sin labrar al ir o volver) mientras que otras se realizaron contiguas. Ello implica haber empleado dos tipos de giro en cabecera que denominaremos giro en omega y giro en T. El primero saca provecho del sistema de autoguiado y realiza el trabajo en pasadas alternas de manera que el viraje resulte suave y a velocidad constante. El giro en T, en cambio, supone avanzar y retroceder para poder entrar en líneas consecutivas dejando poco espacio en cabecera. La denominación omega (Ω) y T hace referencia al patrón que se refleja en campo y que puede observarse en la superimposición del trabajo del GPS respecto a las imágenes georreferenciadas (figura 4).
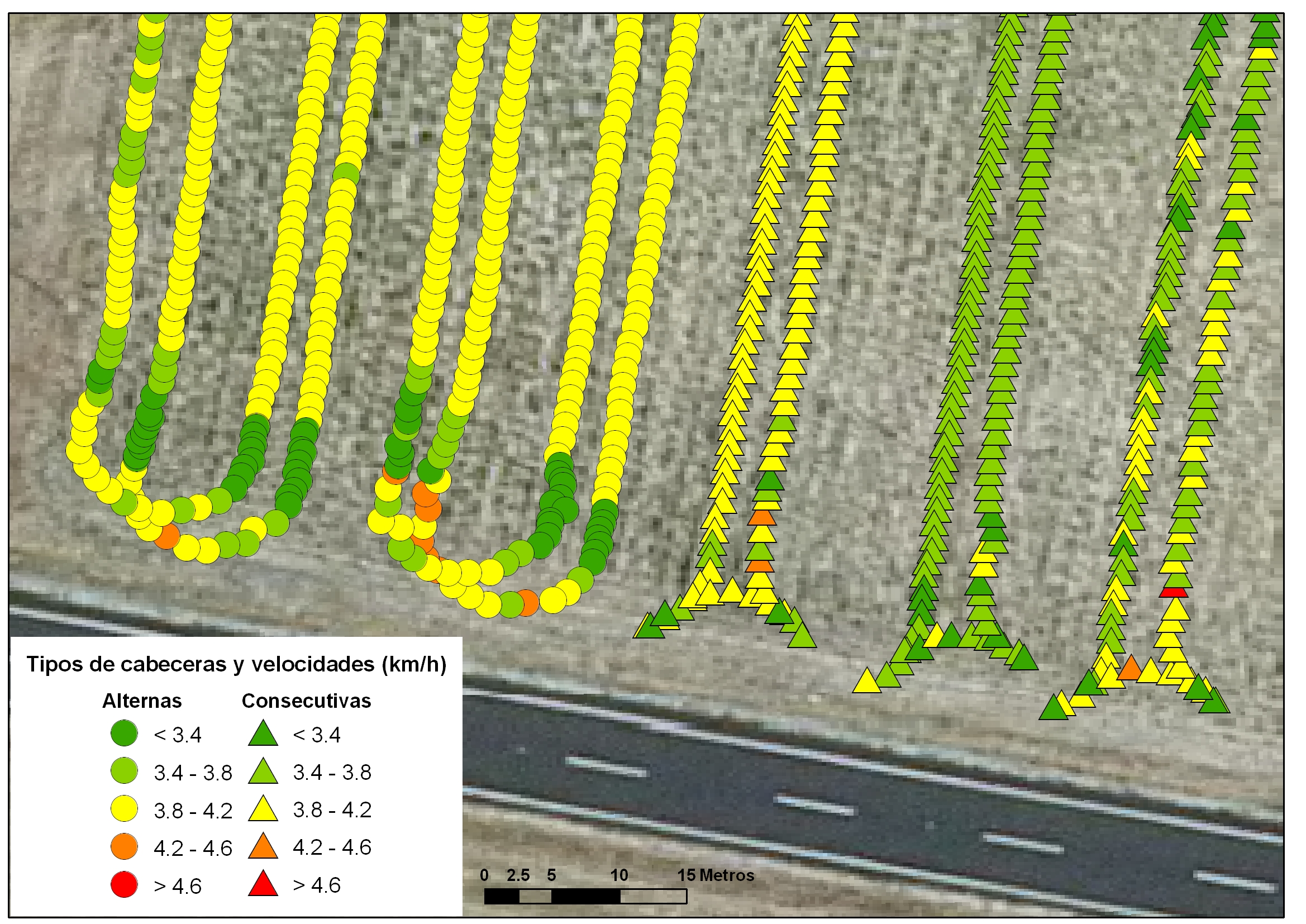
Figura 4. Detalle de algunos recorridos realizados en pases alternos o consecutivos de grada, en los que se aprecian los dos tipos de giro en cabeceras.
Un primer efecto apreciable al usar un sistema de asistencia al guiado/autoguiado es el trazado correcto de las besanas paralelas y su repercusión en la anchura real trabajada del suelo. Para ello se midió la distancia entre pasadas tras realizar la labor en todas las trayectorias alternas, en al menos tres puntos a lo largo de cada besana. Los valores oscilaron entre 2,68 m y 3,36 m de distancia entre pasadas, con un promedio de 2,935 m y desviación típica de 15 cm. Si comparamos estos datos con la anchura real de trabajo del apero según nuestras mediciones (2,9 m) y con la precisión del GPS podremos sacar algunas conclusiones.
Es frecuente ver en los folletos de fabricantes de maquinaria y de equipos de agricultura de precisión valores sobre la magnitud del error de localización con GPS algo confusos y dispares. Al sistema empleado en estas pruebas (corrección diferencial de la señal GPS mediante el sistema de aumentación europeo Egnos) comúnmente se le asigna un nivel de precisión inferior al medio metro en la documentación comercial. Sin embargo, la propia agencia europea de navegación (GSA) le otorga errores cercanos a los 3 m en muchos escenarios. Por tanto, haber obtenido diferencias en las distancias entre pasadas de sólo 40 cm de media en nuestras pruebas da idea de: (1) las buenas condiciones de recepción del GPS en el momento de realizar el trabajo, y (2) la calidad de los componentes electrónicos y la buena integración de la información GPS en el sistema hidráulico de dirección del tractor.
Cuadro V. Caracterización de los virajes según parámetros de la centralita de motor.
| Régimen | Carga | Presión_i | Ad_blue | Consumo | Porcentaje | Duración | ad_blue | |
| rpm | % | psi | kg/h | l/h | datos >15l/h | s | % masico | |
| Giro omega | 1.902 | 40,45 | 18.000 | 0,4745 | 9,57 | 6,59 | 21,2 | 5,9 |
| giro en T | 1.898 | 44,14 | 17.997 | 0,5257 | 10,73 | 14,27 | 24,3 | 5,83 |
También cabría esperar, dado el exceso de distancia entre pasadas, que hubieran quedado franjas del terreno sin labrar (de hasta 20 cm en algún punto) entre trayectos consecutivos; sin embargo este efecto no fue apreciable, quizá debido a la acción de los extremos de la grada sobre el terreno y a la escasa compactación.
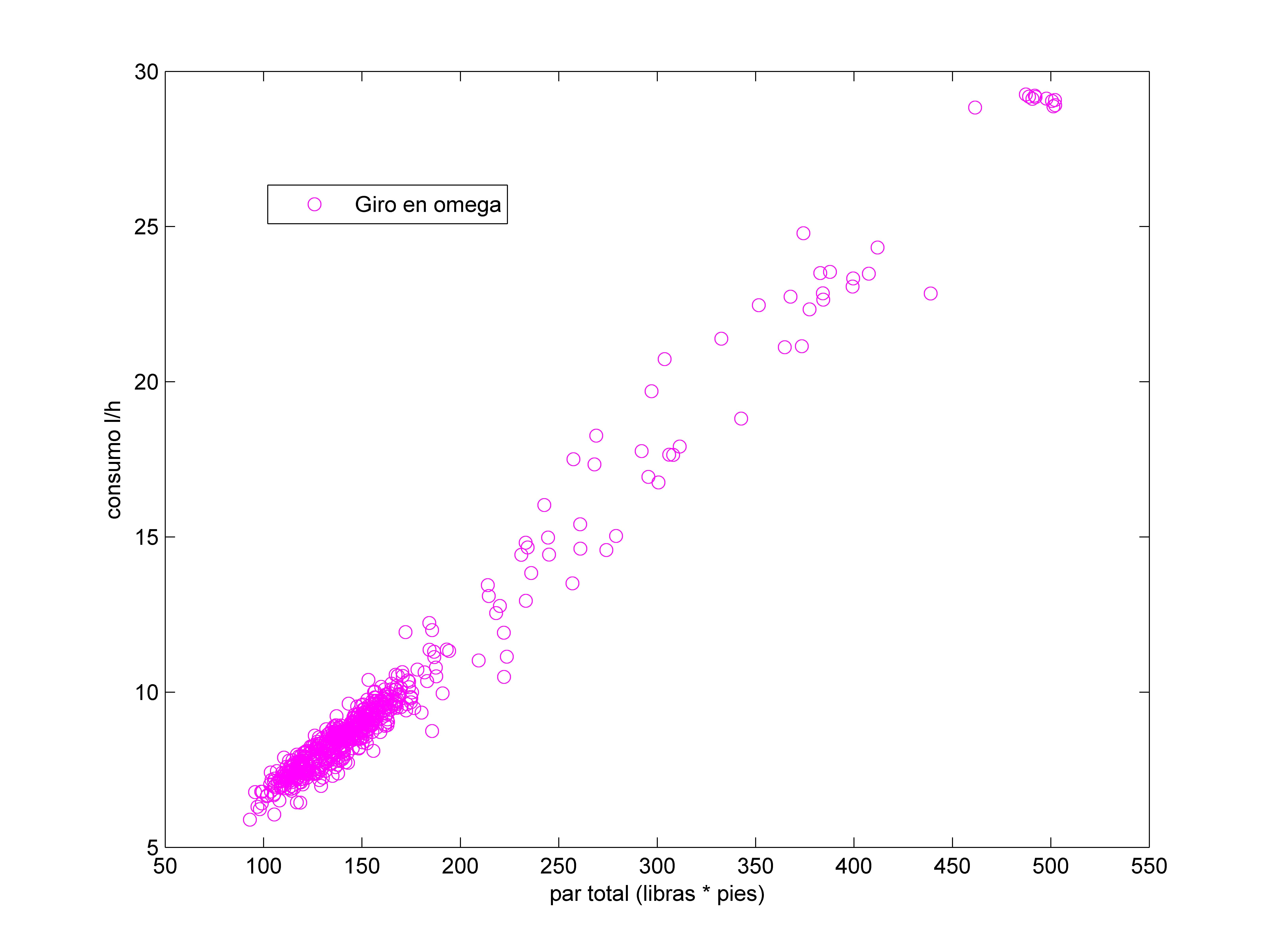
Figura 5. Viraje en omega caracterizado en función del par total y el consumo horario, solo un 6% de los datos tienen un consumo superior a 15 l/h.
En cuanto a la duración de los giros al terminar las besanas, se observaron diferencias en los tiempos registrados con el DGPS de 3 segundos de media (acorde con datos del motor) entre los giros amplios realizados entre pasadas alternas (figura 4; 26,8 s por giro de media) y los giros cerrados en T entre pasadas consecutivas (29,7 s/giro), lo cual indica el ahorro de tiempo, combustible y mayor comodidad conseguidos empleando un sistema de ayuda al guiado en el tractor. La serie de tractores T6 incorporan un completo sistema de gestión automática de tareas en cabecera (elevación de aperos, desconexión tdf, servicios hidráulicos, etc.) que hace más confortable este tipo de trabajo repetitivo, y ello puede explicar en parte la escasa duración de los giros en T, habitualmente más laboriosos.
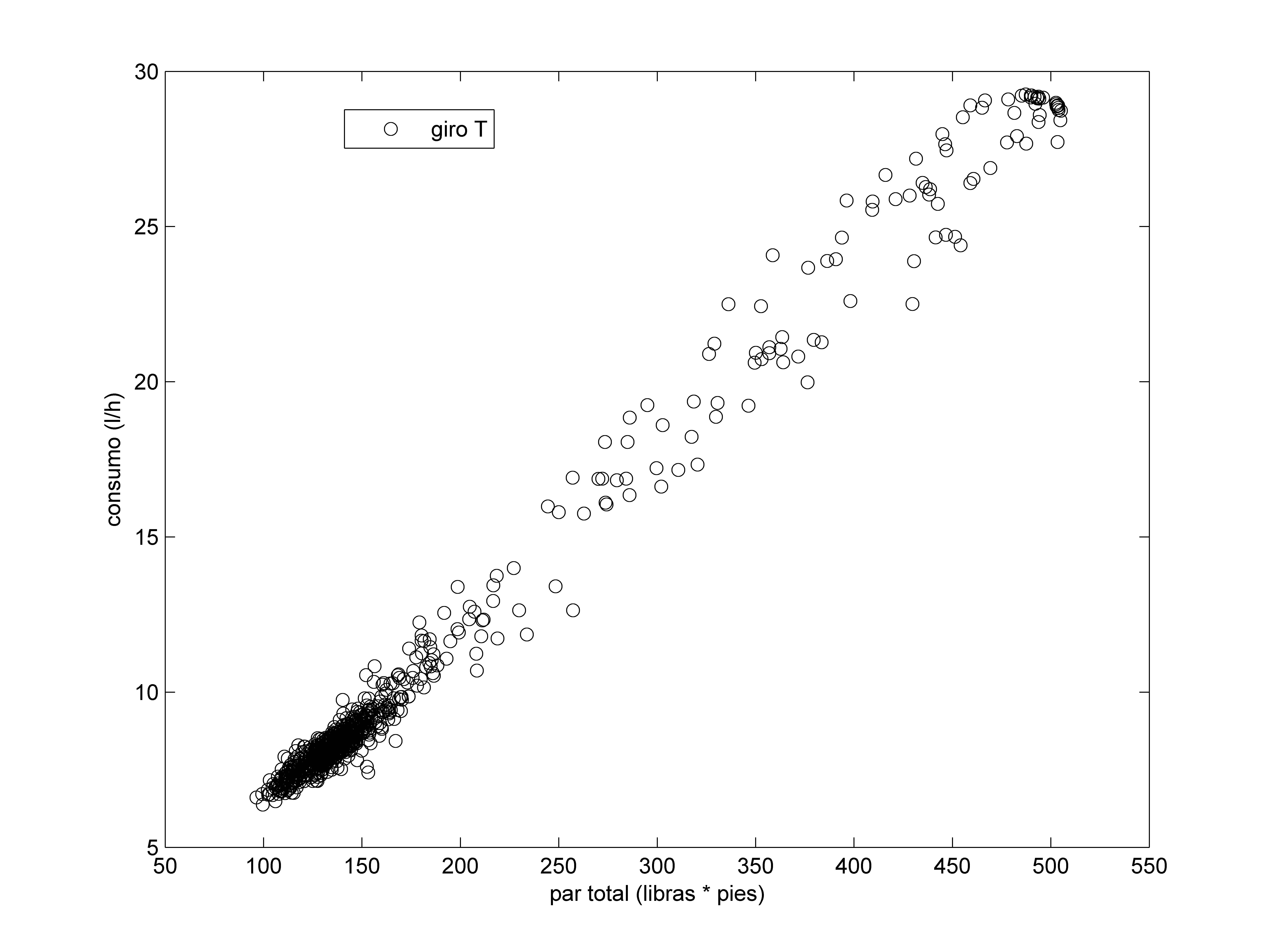
Figura 6. Viraje en T caracterizado en función del par total y el consumo horario, un 14% de los datos tiene un consumo superior a 15 l/h debido a las paradas y arranques en un sentido u otro.
El cuadro V muestra los valores de régimen y carga de motor, consumo horario y duración de los virajes. Destaca el menor nivel de carga de motor en los giros de pasadas alternas (omega) respecto a los giros en T (40,45% y 44,14%, respectivamente), pero sobre todo el menor consumo horario 9,72 l/h) respecto a 10,73 l/h debido entre otras cosas al mucho menor porcentaje de datos con consumos por encima de 15 l/h (6,59% respecto a 14,27%). Este hecho se aprecia asimismo en las figuras 5 y 6.
Resultados de las pruebas de transporte
Como se ha mencionado anteriormente, para la prueba de transporte el personal de New Holland dispuso un remolque para manejo de pacas, en el que se cargaron 36 pacas de paja de cereal, de unos 310 kg cada una (muchas mojadas por las lluvias recientes). El conjunto tractor-remolque cargado arrojó un peso en báscula de 21.600 kg (6.300 kg correspondientes al tractor y 4.100 kg a la tara del remolque). Queremos poner de manifiesto que se trata de un tractor potente de unos 140 CV de potencia máxima con un peso muy ajustado, aspecto que resulta muy conveniente para reducir la compactación del suelo en el trabajo de campo pero que en transporte ha de ir acompañado por remolques bien dotados.
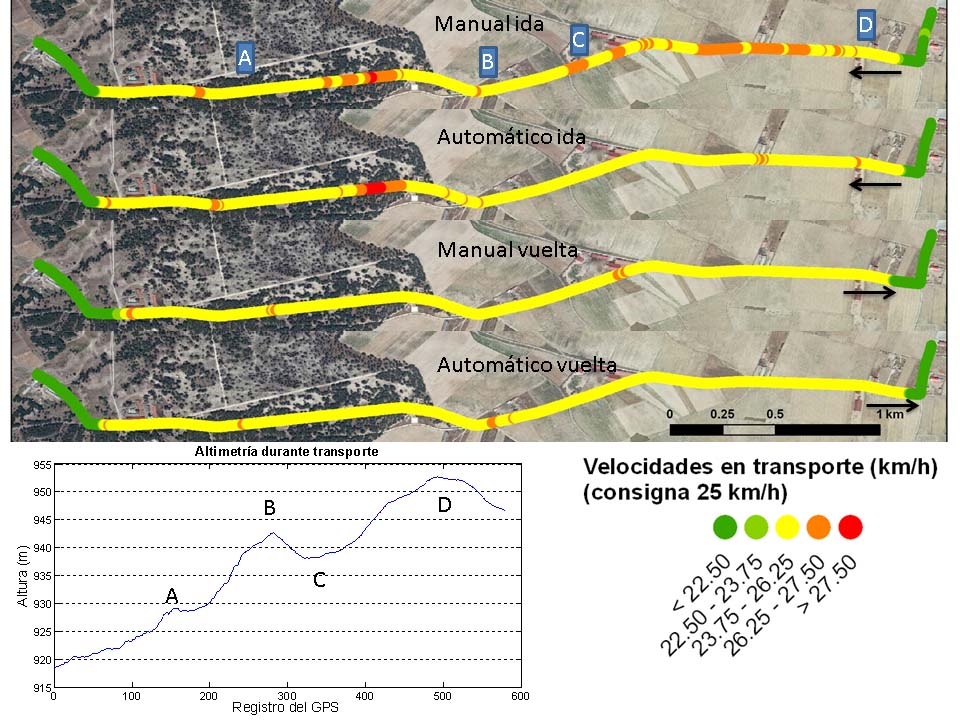
Figura 7. Recorridos realizados con el remolque durante su transporte y velocidades registradas con GPS, tanto en conducción en modo automático como manual.
Este tractor no dispone de freno motor entre otras cosas porque no tiene inercia suficiente para parar un cargamento que le duplica en peso. Aun así en este ensayo se puso toda la carne en el asador y se evaluó en modo manual y automático a una velocidad de crucero de 25 km/h (máximo permitido para este remolque). La prueba de transporte se planificó de forma que el tractor repitiese un recorrido de unos 7 kilómetros (ida y vuelta) en ambos modos de trabajo. El camino elegido presentaba dos repechos importantes a lo largo de su recorrido (ver gráfica de la altimetría durante el transporte en la figura 7), de unos 15 metros de desnivel cada uno, que afectaron a la velocidad de trabajo y a la gestión de motor y transmisión.
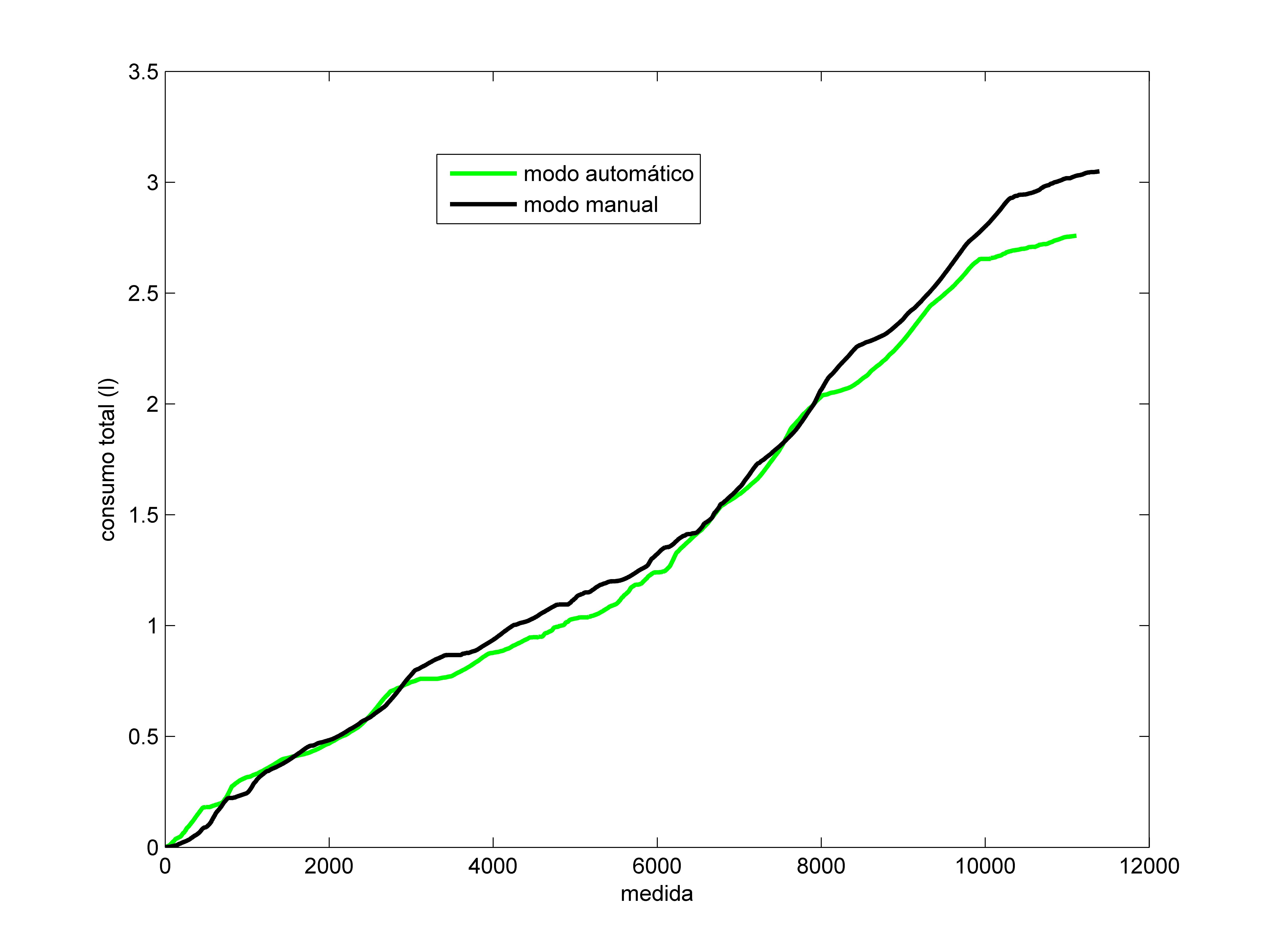
Figura 8. Consumo acumulado en el ensayo de transporte en modo manual y automático.
El cuadro VI muestra ahora sí que el modo de conducción automático es más favorable que el modo manual cuando no se ve tan constreñido como con el trabajo a la tdf. El modo automático trabaja en promedio 200 rpm por debajo del manual con ahorros de combustible (l/km) del 7,5%. Estos resultados resultan más evidentes cuando se representa el régimen del motor en ambos modos en el recorrido de 7,18 km, así como el consumo acumulado (figura 8). En la figura 6 destaca que el ahorro de combustible en modo automático puede ser lento pero es inexorable.
Cuadro VI. Datos registrados de motor durante las pruebas de transporte, con gestión automática y manual de trasmisión y motor.
| Régimen | Carga | Presión_i | Ad_blue | Consumo | Velocidad | Consumo | Ad_blue | |
| rpm | % | psi | kg/h | l/h | km/h | l/km | % masico | |
| Tpte_auto | 1.334 | 53,8 | 13.982 | 0,4773 | 8,88 | 22,80 | 0,389 | 6,40 |
| Tpte_manual | 1.583 | 47,6 | 15.389 | 0,4906 | 9,5 | 22,56 | 0,421 | 6,14 |
Respecto al consumo de Adblue, cabe destacar la gran uniformidad que se ha obtenido en todos los tipos de ensayo situándose en todos los casos en torno a un 6% en masa de combustible.
A modo de conclusión

El ensayo de transporte se evaluó en modo manual y automático a una velocidad de crucero de 25 km/h.
Se trata de un tractor potente (unos 140 CV de potencia máxima) con una gran maniobrabilidad a baja velocidad gracias a la transmisión CVT, capaz de realizar tanto trabajo de campo con elevadas necesidades de potencia a la tdf, como transportes de alto tonelaje (fácilmente realiza transportes que duplican su peso).Es un tractor ligero (6 t) que es delicado con el suelo (baja compactación) y se adapta a las necesidades del mercado nacional. Requiere eso sí de remolques con frenos puesto que su ligereza lo hace vulnerable.
En este tractor el embrague pasa a ser un elemento de seguridad puesto que la CVT hace que su uso sea mínimo.
En este ensayo hemos verificado la economía en el uso de un sistema de autoguiado, no sólo en términos de capacidad de trabajo efectiva (reducción de tiempos de viraje del 12,7%), sino en reducción del consumo en cabeceras (ahorro del 10,8 % al realizar pasadas alternas). La sencillez de su uso hace que la grabación de secuencias en cabecera no resulte necesaria (aunque está disponible), y el sencillo sistema de desconexión automática de la tdf al elevar el apero, o la desconexión automática de la doble tracción durante el viraje son más que suficientes. l